LlamaCanon¶
A Forgather implementation of Canon Layers from "Physics of Language Models: Part 4.1, Architecture Design and the Magic of Canon Layers" (Allen-Zhu, 2025).
Architecture¶
Canon layers are lightweight depthwise causal 1D convolutions that promote horizontal information flow across neighboring tokens. Each Canon layer computes a causal weighted sum of the current and K-1 previous token representations, independently per channel:
h'_t = w_0 * h_t + w_1 * h_{t-1} + ... + w_{K-1} * h_{t-K+1}
output = h_t + h'_t (residual connection)
Implemented as nn.Conv1d(groups=hidden_size) with kernel_size=4 (default).
Insertion Points¶
Canon layers are inserted at four positions within each transformer block:
- Canon-A: After input LayerNorm, before attention. Dim:
hidden_size - Canon-B: After Q/K/V projections, before attention computation. Dim:
(n_heads + 2*n_kv_heads) * d_head - Canon-C: After post-attention LayerNorm, before MLP. Dim:
hidden_size - Canon-D: After gate/up projections in SwiGLU MLP, before gating. Dim:
2 * intermediate_size
Parameter Overhead¶
For the 4M config (hidden=256, intermediate=768, 4 layers): - Canon-A: 256 * 4 = 1,024 per layer - Canon-B: 768 * 4 = 3,072 per layer - Canon-C: 256 * 4 = 1,024 per layer - Canon-D: 1,536 * 4 = 6,144 per layer - Total: ~45K additional parameters (~1% overhead)
Configuration¶
# Canon hyperparameters (added to model_config)
canon_kernel: 4 # Convolution kernel size (window of tokens)
canon_residual: True # Add input as residual connection
Commands¶
cd examples/models/llama_canon
# List configurations
forgather ls
# Construct model
forgather -t 4M.yaml model --device cpu construct
# Test forward/backward
forgather -t 4M.yaml model --device cuda test --steps 5
# Train (via tiny_experiments)
cd ../../tiny_experiments/tiny_models
forgather -t tiny_llama_canon.yaml train -d 0
Comparison Results (4M models, 1 epoch Tiny Stories)¶
All models trained on Tiny Stories (abridged) for 1 epoch with identical hyperparameters (AdamW, lr=1e-3, batch_size=32, InfiniteLR scheduler).
| Model | Params | Final Loss | Eval Loss | Avg Loss | Tok/s | Memory |
|---|---|---|---|---|---|---|
| LlamaCanon | 4.48M | 1.2954 | 1.2258 | 1.6905 | 204,240 | 2.12G |
| DeepOne | 4.16M | 1.3445 | 1.2814 | 1.7528 | 239,274 | 1.50G |
| Llama | 4.16M | 1.3733 | 1.3028 | 1.8061 | 287,678 | 1.50G |
| Causal (Post-LN) | 3.88M | 1.3940 | 1.3262 | 1.8541 | 301,521 | 1.19G |
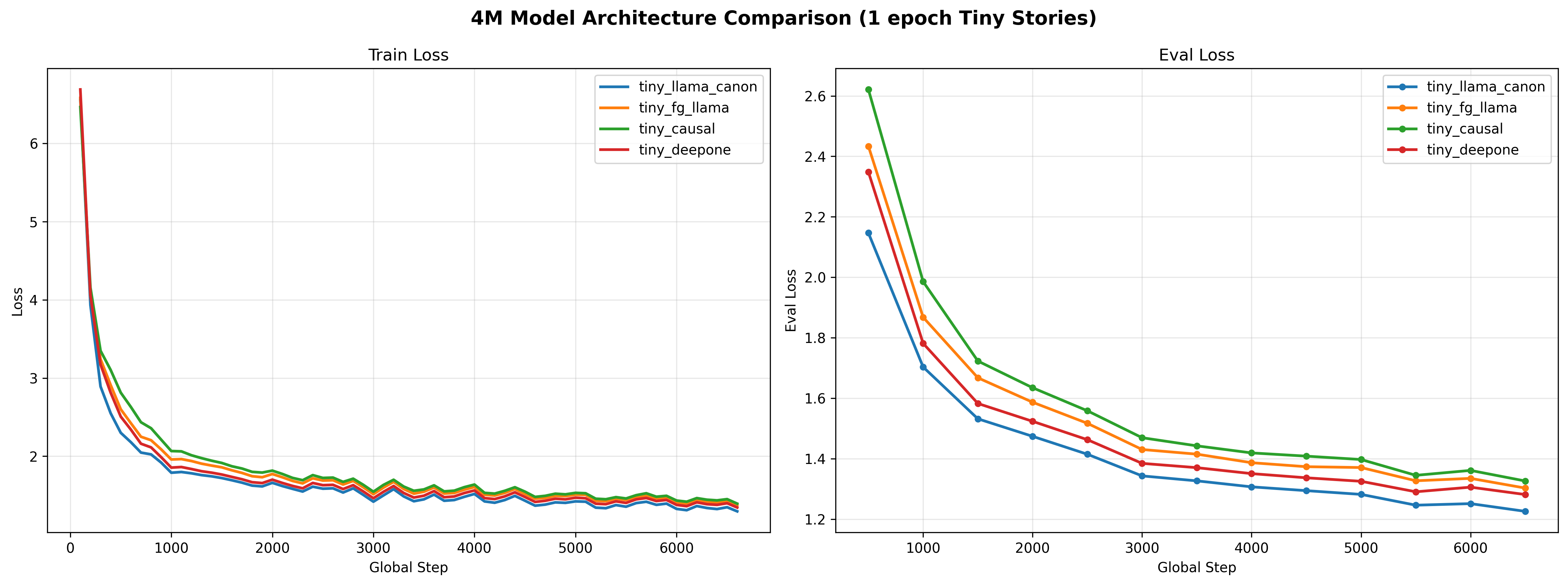
Loss Curves¶
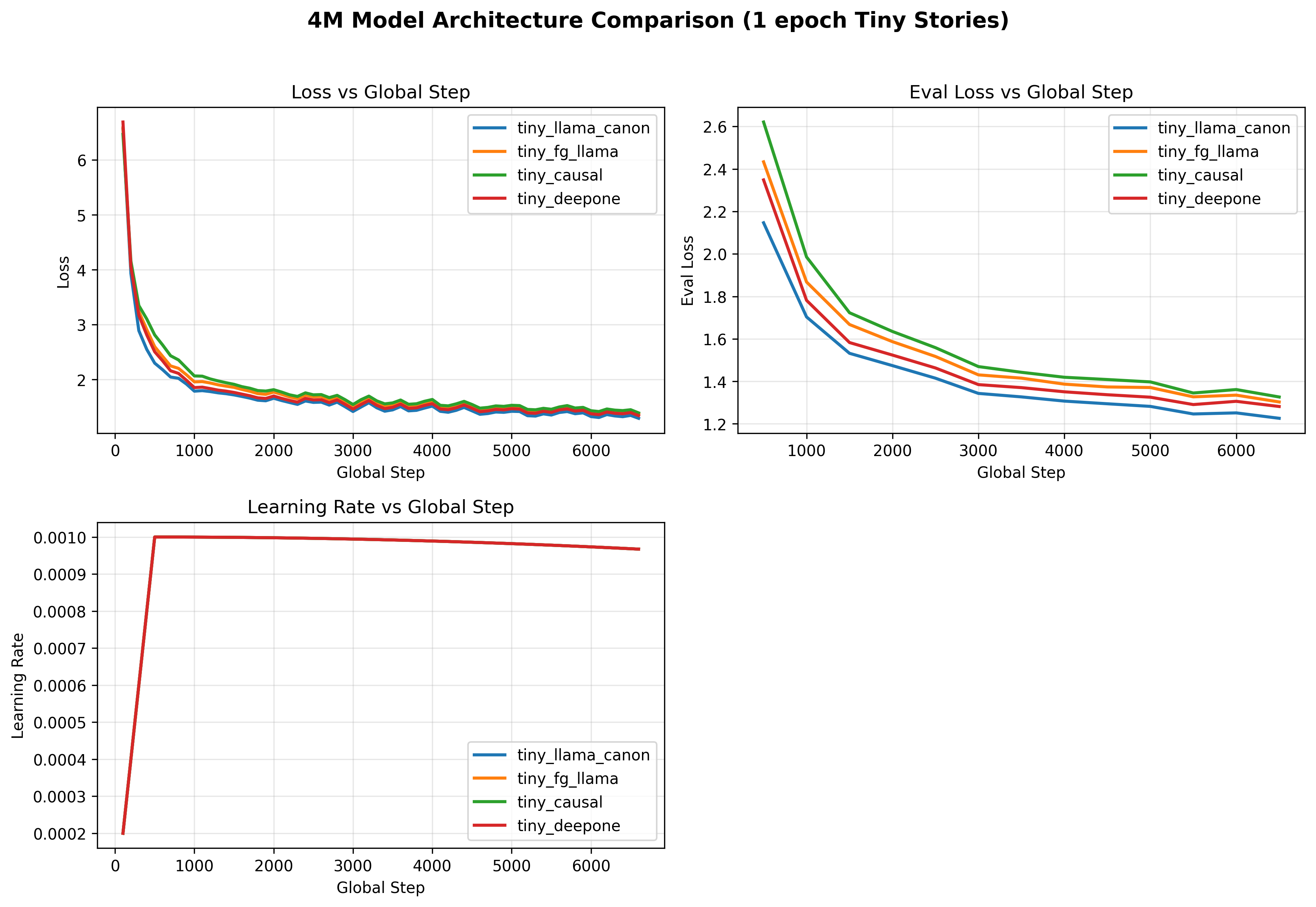
Training Metrics¶
Key Observations¶
-
LlamaCanon achieves the lowest final loss and eval loss across all four architectures, with a 5.7% improvement in final train loss over standard Llama (1.2954 vs 1.3733) and a 5.9% improvement in eval loss (1.2258 vs 1.3028).
-
Convergence speed: LlamaCanon converges faster throughout training, with lower average loss (1.6905 vs 1.8061 for Llama), suggesting the Canon layers help the model learn more efficiently from the start.
-
Throughput tradeoff: Canon layers add ~1.4x wall-clock overhead compared to standard Llama (324s vs 230s). A custom Triton streaming kernel for larger dimensions (Canon-B, Canon-D) and elimination of tensor concatenation/splitting reduced the overhead from the original 1.8x (417s). For larger model dimensions the Triton kernel speedup increases (up to 3x for d=1536).
-
Memory overhead: Canon layers increase peak memory by ~41% (2.12G vs 1.50G), reduced from 49% by eliminating concatenated QKV and gate/up intermediate tensors.
-
Gradient stability: LlamaCanon shows the lowest average gradient norm (0.3696), suggesting the Canon layers' residual connections contribute to training stability.
-
DeepOne is a strong baseline: The DeepNet architecture with ALiBi attention places second, outperforming standard Llama by a meaningful margin.
Performance Optimizations¶
Triton Streaming Kernel¶
The Canon layers include a custom Triton kernel for the depthwise causal Conv1d operation. Instead of the default PyTorch path (transpose -> Conv1d -> slice -> transpose -> residual add), the Triton kernel processes all time steps sequentially with a register-based sliding window, operating directly on the [B, T, C] tensor layout.
The kernel is used automatically on CUDA when C >= 384 (where it outperforms cuDNN).
For smaller dimensions, the standard Conv1d path is used.
Microbenchmarks (RTX 3090, B=32, T=512, K=4, bf16, fwd+bwd):
| Dimension | Conv1d | Triton | Speedup |
|---|---|---|---|
| C=256 | 0.34ms | 0.44ms | 0.77x (Conv1d used) |
| C=768 | 1.05ms | 0.52ms | 2.0x |
| C=1536 | 2.10ms | 0.66ms | 3.2x |
Cat/Split Elimination¶
Canon-B and Canon-D originally concatenated sub-tensors (Q/K/V or gate/up) before applying the convolution. Since depthwise conv is channel-independent, the conv is applied to each sub-tensor separately using weight slices, eliminating the concatenation memory overhead.
Project Structure¶
llama_canon/
meta.yaml # Project metadata
modelsrc/
canon_layer.py # Core Canon layer (depthwise causal Conv1d)
canon_pre_ln_layer.py # PreLN layer with Canon-A and Canon-C
canon_causal_multihead_attn.py # Multi-head attention with Canon-B
canon_glu_feedforward.py # GLU feedforward with Canon-D
templates/configs/
default.yaml # Default config (extends dynamic_llama)
4M.yaml # 4M parameter tiny model
References¶
- Paper: arXiv:2512.17351
- Code: github.com/facebookresearch/PhysicsLM4